3.1 Design overview of TENGOO
TENGOO has a camera and interface component, TENGOO-S, which is composed of optics, image sensor, analog front-end electronics (AFE), and analog-to-digital conversion (ADC) function, and TENGOO-E, which has a field-programmable gate array (FPGA), secondary power supply, and communication functions with the spacecraft system. TENGOO-S can operate when it is placed 2 m away from TENGOO-E. Figures 3.1-1 and 3.1-2 show external views of TENGOO-S and TENGOO-E, respectively.
TENGOO-S has a catadioptric telescope. Its focal length is 947.8 mm, while the effective F-number is 8.9. The detector is an interline charge-coupled device (CCD), (KAI-08051). The pixel pitch of the CCD is 5.5 µm, while the number of pixels is 3296 × 2472. Thus, the iFoV is 5.9 µrad, while the diagonal FoV is 1.34°. The optical system is panchromatic and consists of a primary mirror, secondary mirror, and corrective lens system consisting of four lenses.
The masses of TENGOO-S and -E are 4.8 and 1.2 kg, respectively. The dimensions of TENGOO-S and E are φ301.2 mm × 352.5 mm and 201.2 mm × 181.2 mm × 49.5mm, respectively. The storage temperature is -30 to +60 ºC. The temperature of the telescope should be maintained at +20±5 ºC during observation.
3.2 Design overview of OROCHI
OROCHI has a camera part and interface part in one housing. For multi-band observations, OROCHI has seven bandpass filters. The center wavelengths are 390, 480, 550, 650, 730, 860, and 950 nm, while the bandwidths are 50, 30, 30, 40, 40, 40, and 60 nm, respectively. OROCHI also has seven optics and seven CCD image sensors without filter wheel, although Hayabusa2/ONC-T has a filter wheel. The filter wheel has a limited number of rotations. If it stops in the middle of changing the filter, no further observations can be carried out. In addition, when the ground speed is high, particularly during the descent phase, the FoV moves while the filter is being changed. OROCHI has seven independent bandpass imagers to avoid these problems. In addition, OROCHI has a monochromatic camera (550 nm) dedicated to the observation during the landing phase. The spatial resolutions of the seven bandpass imagers are below 5 mm but above 1 mm because of the small distance (~0.8 m). The focus of the monochromatic camera is adjusted for a distance of 0.8 m and its spatial resolution is ~0.7 mm. Thus, OROCHI has eight cameras in total. During the landing phase, the sample collection point may be in the shadow of the spacecraft. To prepare for such cases, OROCHI has a light emitting diode (LED) unit. Figures 3.2-1 and 3.2-2 show external views of OROCHI with and without hood, respectively
The OROCHI’s eight optics are almost identical; however some gaps between lenses, aperture stop, etc., are optimized for each band. Its focal length is 13.23-13.57 mm, and effective F-number is 5.8–6.4. The detectors are interline CCDs (KAI-08051). The pixel pitch of the CCD is 5.5 µm and the number of pixels is 3296 × 2472. Thus, the iFoV is 0.44–0.46 milliradians, while the diagonal FoV is 83–85.5°.
The mass of OROCHI is 12.13 kg. Its dimensions are 243 mm × 368 mm × 368 mm. The storage temperature is -30 to +60 ºC and the operation temperature is -20 to +55 ºC.
3.3 Detectors and electronics
TENGOO and OROCHI use the same model number CCD, KAI-08051. This is an interline CCD. Its total number of pixels is 3364 × 2520, which includes dark reference pixels, and the number of active pixels is 3296 × 2472. We performed a comparative study between KAI-08051 and KAI-08052. KAI-08052 is a newer type of detector, which is approximately twice more sensitive in the near-infrared range, but has approximately three times higher dark current. During the landing phase, the temperature of the instrument is expected to increase, which increases the dark current, which is disadvantageous when LEDs are used to illuminate areas in the shadow of the spacecraft and acquire images with long exposure times. In order to ensure low development costs, we chose KAI-08051 for all CCD image sensors used in TENGOO and OROCHI.
Figures 3.3-1 and 3.3-2 show block diagrams of TENGOO and OROCHI, respectively. TENGOO has two AFEs for readout and uses two CCD output ports to increase the speed of the readout. The highest frame rate is 1.15 frame/s. TENGOO-E receives commands and sends out telemetry through SpaceWire (SpW). We use the high-speed serial interface Serializer Deserializer (SERDES) for the transmission of the imaging data. Both SpW and SERDES are redundant in systems A and B. The power consumption of TENGOO is approximately 7 W in standby and approximately 15 W in imaging and readout.
OROCHI has almost the same electronics as TENGOO. It has only two AFEs for readout. Eight cameras are connected to the switch in parallel; therefore, it is not possible to read from more than two cameras simultaneously. For simultaneous imaging in multiple bands, OROCHI reads out up to seven wavelengths in sequence. Figure 3.3-3 shows the CCD readout timing diagram for simultaneous imaging at seven wavelengths with OROCHI. As an illumination method for the landing phase, we use a combination of a white LED and multiple monochromatic LEDs. Figure 3.3-4 shows a conceptual diagram of the system of a white LED and five monochromatic LEDs (390, 480, 730, 860, and 950nm). Only the white LED is used at 550 and 650 nm because of its high intensity at these wavelengths. With this illumination unit, the area within a circle with a radius of 0.25 m becomes brighter than 1/100 of the sunlit surface. The power consumption of OROCHI is approximately 7 W in standby and 18 W in imaging and readout. The power consumption of the illumination unit is approximately 30 W in total.
3.4 Optical design
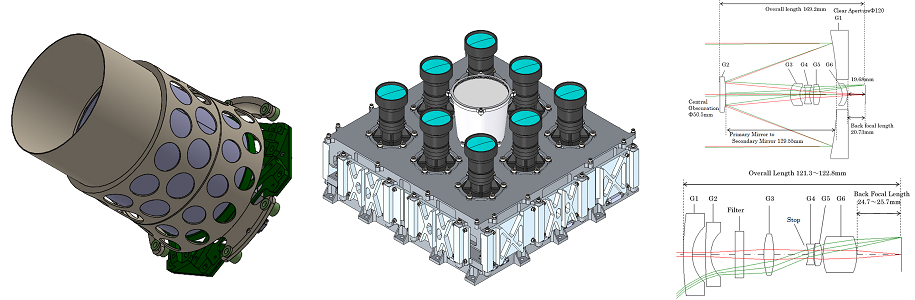
The optical system of TENGOO is catadioptric and consists of two mirrors (primary and secondary) and correction lens consisting of four lenses. An optical design schematic of TENGOO is shown in Figure 3.4-1. This system consists of rotationally symmetric aspheric primary and secondary mirrors and four spherical corrective lenses. The effective diameter of the primary mirror is 120 mm, and the diameter of the shielded part is 50.5 mm. In the order in which the incident light is reflected or transmitted, there is a primary mirror (G1), secondary mirror (G2), and corrective lenses (G3-6), leading to the sensor. The glass material is all fused silica for radiation tolerance. The length from the surface closest to the object to the sensor is 169.2 mm and the outer diameter of the primary mirror is 149.6 mm.
The OROCHI optical system is a retrofocus type and consists of eight optical systems, seven for each observation wavelength and one for monochromatic imaging. An optical design schematic of the optics of OROCHI for a center wavelength of 550 nm is shown in Figure 3.4-2. The eight optical systems differ in the radius of curvature of the surface on the sensor side of G3, gap between G2 and G3, aperture diameter, and filter for each wavelength range and for monochromatic imaging. The spacing between G2 and G3 is adjusted for each wavelength range to reduce the effects of manufacturing errors. The differences in the optical systems for each wavelength and for monochromatic imaging are minor; structurally, they are almost identical. The outer diameter of G1 is 46 mm. At the center wavelength of 550 nm, the length from the first surface of the optical system to the sensor is 121.9 mm.
As shown in Figure 3.4-2, the filter is placed between G2 and G3, to place the filter far away from the sensor to reduce stray light due to reflection between the filter and sensor and minimize the difference in the angle of incidence across the FoV to reduce the effect of the dependence of the filter on the angle of incidence. The back focus (distance from G6 to the sensor) should be long to reduce stray light due to reflection between G6 and the sensor. It is set to 24.9 mm at the center wavelength of 550 nm.
3.4.1 Radiometric performance
The SNR required for TENGOO for topographic observation is > 30. We calculated the surface brightness of Phobos under the following conditions:
- The distance of Mars from the Sun is 1.666AU (aphelion).
- The incidence angle of sunlight is 30° and the emission angle is 0°.
- Phobos has a Lambertian surface with a reflectance of 7%.
The signal is calculated from the surface brightness, the optical system transmittance, and the quantum efficiency of the CCD. The random noise was calculated as the root sum square of statistical noise, readout noise, and dark current noise. The dark current will be corrected by subtracting the dark image from the observed image in operation. When Phobos and Mars are out of the FoV, multiple dark images are acquired in different viewing directions, and the portion without stars is used. Here, we assumed the CCD temperature is +30 °C for the highest dark current case. As a result, the exposure time should be longer than 1.2 ms for SNR > 30. The ground speed at QSO is approximately 3 m/s, thus the shift of FoV in this exposure time (36 mm) is adequately smaller than the required resolution (0.3 m). The attitude stability of the spacecraft is < 3 µrad (3 σ) for 10 ms, which corresponds to 1/2 pixel, thus the blurring of the image during this exposure time is also sufficiently smaller than the required resolution.
The SNR required for OROCHI for spectroscopic observation is > 100. The F-numbers are 6.4 for 390-730 nm, 6.2 for 860nm, and 5.8 for 950 nm. As a result, the exposure times for SNR of 120 are 0.099 sec for 390 nm, 0.071 sec for 480 nm, 0.074 sec for 550 nm, 0.086 sec for 650 nm, 0.14 sec for 730 nm, 0.49 sec for 860 nm, and 0.84 sec for 950 nm. The shift of FoV in this exposure time of 1 sec is ~3 m, and it is adequately smaller than the resolution of 20 m required for QSO observation. The attitude stability of the spacecraft is < 0.17 mrad (3 σ) for 1 s, which corresponds to 0.4 pixels, thus the blurring of the image during the shorter exposure time is also sufficiently smaller than the required resolution.
We need longer exposure time when we obtain the image of the surface in the shadow of spacecraft using the LED illumination because the surface brightness is 1/100 of the sunlit surface. To achieve SNR > 100, we have to use 2 × 2 binning mode and the required exposure times are 4.84 sec, 3.56 sec, 3.64 sec, 4.39 sec, 7.14 sec, 26.7 sec, and 52.4 sec, respectively. In addition, we have to take multiple images with shorter exposure time for 860 nm and 950 nm because the number of integrated electrons exceed the full well capacity of CCD.
3.4.2 Optical resolution
The MTFs of TENGOO were calculated in the spectral range of 350-950 nm. Here we have considered the spectrum of incident flux, quantum efficiency of the detector, and optics transmittance. The result is shown in Figure 3.4.1-1. The MTF at Nyquist frequency (91 lp/mm) is more than 0.29 in design. Although invar, a material with low thermal expansion, is used in the support structure of the telescope, the temperature of the telescope needs to be controlled within a range of +/-5 °C. Figure 3.4.1-2 shows the MTF at Nyquist frequency is 0.25 at -5°C relative to the nominal temperature and the guaranteed smallest value of MTF is 0.2. Note that the change in MTF when the pressure changes from ambient to vacuum is negligible because the refractive power is mainly carried by the mirror.
The MTF of OROCHI was calculated by assigning the same weight to the three wavelengths of the central, longest, and shortest wavelengths for each band (e.g., for a central wavelength of 390 nm and a bandwidth of 50 nm, the same weight was assigned to the three wavelengths of 415 nm, 390 nm, and 365 nm). The calculated MTFs for each band are shown in Figures 3.4.2-3 to 3.4.2-9. The nominal values of MTFs at the Nyquist frequency (91 lp/mm) are 0.31-0.44 at a distance of 20 km over the entire FoV. As shown in Figure 3.4.2-10, the MTF at the Nyquist frequency is 0.31 over the entire FoV for monochromatic imaging during the landing phase at a distance of 0.8 m with a center wavelength of 550 nm and a bandwidth of 30 nm.
{kind=link}