For neutral (non-charged) hydrogels that are swollen and lubricated with pure water, the biphasic lubrication mechanisms are crucial for understanding friction. In this study, we developed a theoretical model based on the biphasic lubrication theory (or equivalently, the stress-diffusion coupling model or the diffusio-mechanical coupling model for gel dynamics [38–40]).
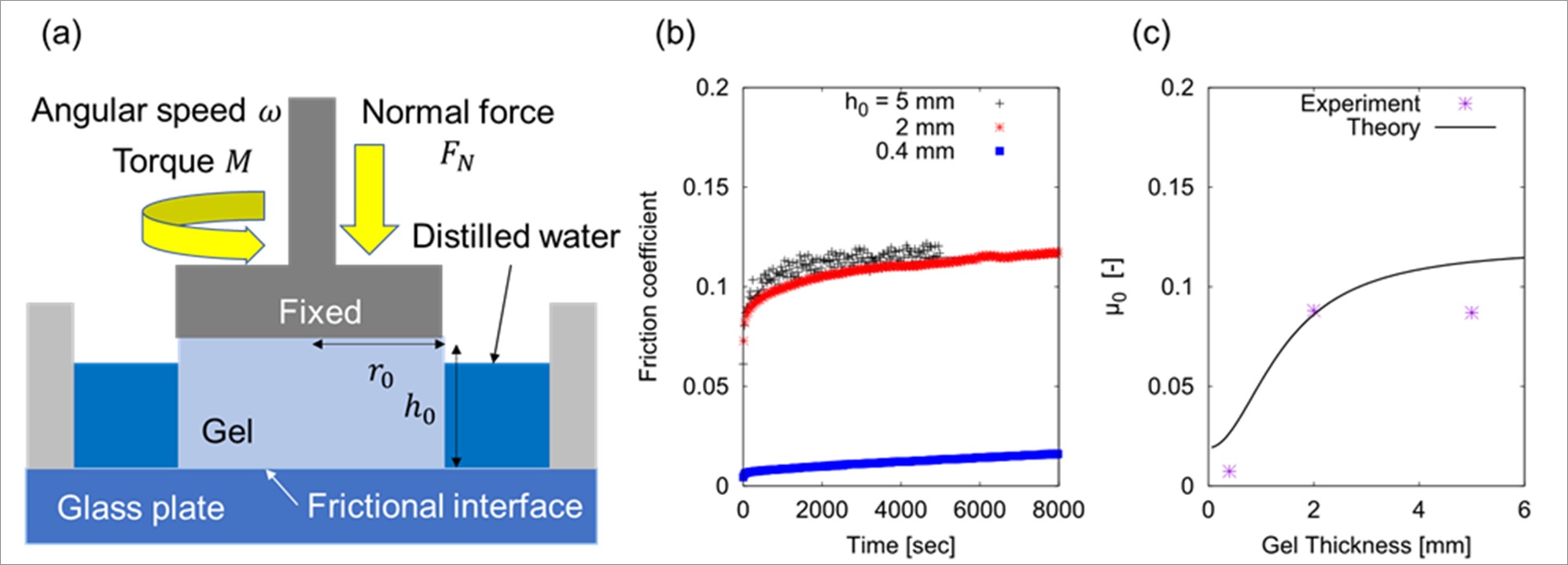
The model geometry is depicted in Fig. 2. The top surface of the cylindrical hydrogel is fixed onto a rigid disk, and the bottom surface is slid against a glass plate. The disk (and the hydrogel) is rotated with a constant normal force \(\:{F}_{N}\) [17].
3.1 Governing equations
We begin by applying the theoretical description of the polymer network deformation and the interstitial fluid flow [38,39]. Darcy’s law describes the relationship between the relative solvent velocity and the pressure gradient in a porous polymer network as,
$$\:{\overrightarrow{v}}_{s}(\overrightarrow{r},t)-\frac{\partial\:\overrightarrow{u}(\overrightarrow{r},t)}{\partial\:t}=-\frac{1-\varphi\:}{\zeta\:}\nabla\:p(\overrightarrow{r},t)\:,\:\:\:\:\:\:\:\:\:\left(2\right)$$
where \(\:{\overrightarrow{v}}_{s}(\overrightarrow{r},t)\) is the velocity vector for the solvent, \(\:\overrightarrow{u}(\overrightarrow{r},t)\) is the displacement vector for the polymer, \(\:\varphi\:\) is the volume fraction of the polymer, and \(\:\zeta\:\) is the internal friction constant associated with the polymer relative to the solvent. Here we assume that \(\:\varphi\:\) is uniform and does not change over time. Next, we consider the force balance for the polymer,
$$\:\nabla\:\bullet\:\stackrel{⃡}{\sigma\:}(\overrightarrow{r},t)=\nabla\:\text{p}(\overrightarrow{r},t)\:,\:\:\:\:\:\:\:\:\:\left(3\right)$$
where \(\:\stackrel{⃡}{\sigma\:}(\overrightarrow{r},t)\) is the stress tensor acting on the polymer network. Additionally, the incompressibility of the hydrogel is expressed as:
$$\:\varphi\:\nabla\:\bullet\:\frac{\partial\:\overrightarrow{u}\left(\overrightarrow{r},t\right)}{\partial\:t}+\left(1-\varphi\:\right)\nabla\:\bullet\:{\overrightarrow{v}}_{s}\left(\overrightarrow{r},t\right)=0\:.\:\:\:\:\:\:\:\:\:\left(4\right)$$
The relationship between the stress and deformation of the polymer network is described by the following constitutive equation,
$$\:{\sigma\:}_{ij}=K\sum\:_{k=1}^{3}\frac{\partial\:{u}_{k}}{\partial\:{x}_{k}}{\delta\:}_{ij}+G\left(\frac{\partial\:{u}_{i}}{\partial\:{x}_{j}}+\frac{\partial\:{u}_{j}}{\partial\:{x}_{i}}-\frac{2}{3}\sum\:_{k=1}^{3}\frac{\partial\:{u}_{k}}{\partial\:{x}_{k}}{\delta\:}_{ij}\right)\:,\:\:\:\:\:\:\:\:\:\left(5\right)$$
where \(\:K\) and \(\:G\) are the bulk osmotic modulus and the shear modulus of the hydrogel respectively, and \(\:{\delta\:}_{ij}\) is the Kronecker delta. Combining Eqs. (3) and (5) gives:
$$\:\left(K+\frac{G}{3}\right)\nabla\:\left(\nabla\:\bullet\:\overrightarrow{u}\right)+G{\nabla\:}^{2}\overrightarrow{u}=\nabla\:p\:.\:\:\:\:\:\:\:\:\:\left(6\right)$$
By combining Eqs. (2) and (4), we obtain the Poisson equation for the pressure.
$$\:\nabla\:\bullet\:\frac{\partial\:\overrightarrow{u}(\overrightarrow{r},t)}{\partial\:t}=\kappa\:{\nabla\:}^{2}\text{p}\:,\:\:\:\:\:\:\:\:\:\left(7\right)$$
where \(\:\kappa\:={\left(1-\varphi\:\right)}^{2}/\zeta\:\) is the permeability of the fluid. Substituting Eq. (6) into Eq. (7), we obtain the diffusion equation,
$$\:\frac{\partial\:\omega\:(\overrightarrow{r},t)}{\partial\:t}={D}_{c}{\nabla\:}^{2}{\omega\:}\:,\:\:\:\:\:\:\:\:\:\left(8\right)$$
where \(\:\omega\:=\nabla\:\bullet\:\overrightarrow{u}\) is the volumetric strain and \(\:{D}_{c}=\kappa\:(K+4G/3)\) is the collective diffusion constant [41]. Eqs. (6), (7), and (8) are the basic equations to determine \(\:\overrightarrow{u}(\overrightarrow{r},t)\) and \(\:p(\overrightarrow{r},t)\).
3.2 Deformation of thick cylindrical hydrogels during sliding
First, we consider the friction of cylindrical hydrogels with a thickness not much smaller than the radius, as schematically shown in Fig. 2a. For simplicity, we assume that the deformation is symmetrical about the rotational axis. In addition, we assume that there is no pressure gradient or heterogeneous deformation in the vertical direction, meaning that the sample thickness \(\:{h}_{0}\) does not appear in this theoretical analysis. In the cylindrical coordinate, this gives \(\:\overrightarrow{u}(\overrightarrow{r},t)=\left({u}_{r},{u}_{\theta\:},{u}_{z}\right)=\left({u}_{r}(r,t),{u}_{\theta\:}(r,z,t),{u}_{z}(z,t)\right)\) and \(\:p=p\left(r,t\right)\). By setting \(\:{u}_{z}\left(z,t\right)={\epsilon\:}_{z}\left(t\right)z\) (uniform compressive strain), the volumetric strain \(\:{\omega\:}\) is given by,
$$\:{\omega\:}\left(r,t\right)=\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\:{u}_{r}(r,t)\right)+{\epsilon\:}_{z}\left(t\right)\:.\:\:\:\:\:\:\:\:\:\:\left(9\right)$$
Thus, the diffusion equation (Eq. (8)) can be expressed as follows:
$$\:\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:{u}_{r}(r,t)}{\partial\:t}\right)+{\dot{\epsilon\:}}_{z}\left(t\right)={D}_{c}\frac{1}{r}\frac{\partial\:}{\partial\:r}\left[r\frac{\partial\:}{\partial\:r}\left\{\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\:{u}_{r}(r,t)\right)\right\}\right]\:.\:\:\:\:\:\:\:\:\:\:\left(10\right)$$
The special solution \(\:{u}_{r,s}\) for Eq. (10) can be easily found:
$$\:{u}_{r,\:\:s}\left(r,t\right)=\left\{-\frac{1}{2}{\epsilon\:}_{z}\left(t\right)+\alpha\:\right\}r\:.\:\:\:\:\:\:\:\:\:\:\left(11\right)$$
Next, we solve the homogeneous equation, which can be obtained by applying the variable separation method.
$$\:{u}_{r,h}\left(r,t\right)={\sum\:}_{i}\left\{{A}_{i}\:{J}_{1}\left(\sqrt{\frac{{\lambda\:}_{i}}{{D}_{c}}}r\right)+\:{B}_{i}\:{Y}_{1}\left(\sqrt{\frac{{\lambda\:}_{i}}{{D}_{c}}}r\right)\right\}\:\text{e}\text{x}\text{p}(-{\lambda\:}_{i}t)\:,\:\:\:\:\:\:\:\:\:\:\left(12\right)$$
where \(\:{J}_{1}\) and \(\:{Y}_{1}\) are the Bessel functions of the first and second kind, respectively. Considering the boundary condition \(\:{u}_{r,h}\left(0,t\right)=0\) and taking only the slowest relaxation mode for simplicity, the general solution \(\:{u}_{r}\) can be expressed by the following equation.
$$\:{u}_{r}\left(r,t\right)=A\:{J}_{1}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}r\right)\text{e}\text{x}\text{p}\left(-\lambda\:t\right)+\left\{-\frac{1}{2}{\epsilon\:}_{z}\left(t\right)+\alpha\:\right\}r\:,\:\:\:\:\:\:\:\:\:\:\left(13\right)$$
where \(\:{\epsilon\:}_{z}\left(t\right)\) and three constants \(\:A\), \(\:\alpha\:\), and \(\:\lambda\:\) are determined by the force balance along the z-direction; \(\:{F}_{N}=2\pi\:{\int\:}_{0}^{{r}_{0}}r\:dr\:\left(p-{\sigma\:}_{zz}\right)\), the initial incompressibility condition; \(\:\stackrel{-}{\omega\:}\left(0\right)=0\) (the definition will be given in Eq. (21)), and the two boundary conditions at the sample edge; \(\:p\left({r}_{0},t\right)={\sigma\:}_{rr}\left({r}_{0},t\right)=0\).
Applying Eqs. (6), (13) with \(\:p\left({r}_{0},t\right)=0\), we obtain:
$$\:p\left(r,t\right)=A\left(K+\frac{4}{3}G\right)\sqrt{\frac{\lambda\:}{{D}_{c}}}\:\left\{{J}_{0}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}r\right)-{J}_{0}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\right)\right\}\text{e}\text{x}\text{p}(-\lambda\:t)\:.\:\:\:\:\:\:\:\:\:\:\left(14\right)$$
From the constitutive law (Eq. (5)), the radial stress can be given as,
$$\:{\sigma\:}_{rr}\left(r,t\right)=\left(K+\frac{4}{3}G\right)\frac{\partial\:{u}_{r}}{\partial\:r}\left(r,t\right)+\left(K-\frac{2}{3}G\right)\left(\frac{{u}_{r}\left(r,t\right)}{r}+{\epsilon\:}_{z}\left(t\right)\right)\:.\:\:\:\:\:\:\:\:\:\:\left(15\right)$$
Applying \(\:{\sigma\:}_{rr}\left({r}_{0},t\right)=0\) and substituting Eq. (13) into Eq. (15), we find:
$$\:{\epsilon\:}_{z}\left(t\right)=A\left\{\frac{K+\frac{4}{3}G}{G}\sqrt{\frac{\lambda\:}{{D}_{c}}}\:{J}_{0}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\right)-\:\frac{2}{{r}_{0}}{J}_{1}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\right)\right\}\text{e}\text{x}\text{p}(-\lambda\:t)+2\frac{K+\frac{1}{3}G}{G}\alpha\:\:.\:\:\:\:\:\:\:\:\:\left(16\right)$$
From Eq. (5), the vertical stress \(\:{\sigma\:}_{zz}\) is obtained as,
$$\:{\sigma\:}_{zz}\left(r,t\right)=\left(K+\frac{4}{3}G\right){\epsilon\:}_{z}\left(t\right)+\left(K-\frac{2}{3}G\right)\left(\frac{{u}_{r}\left(r,t\right)}{r}+\frac{\partial\:{u}_{r}}{\partial\:r}\left(r,t\right)\right)\:.\:\:\:\:\:\:\:\:\:\:\left(17\right)$$
Using the vertical force balance and Eq. (17), we obtain,
$$\:\frac{{F}_{N}}{\pi\:{r}_{0}^{2}}=-6K\alpha\:+A\left\{8G\frac{{J}_{1}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\right)}{{r}_{0}}-3\left(K+\frac{4}{3}G\right)\sqrt{\frac{\lambda\:}{{D}_{c}}}\:{J}_{0}\left(\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\right)\right\}\text{e}\text{x}\text{p}(-\lambda\:t)\:.\:\:\:\:\:\:\:\:\:\:\left(18\right)$$
Since the term in the parenthesis “{}” in Eq. (18) must equal to zero, we have:
$$\:\frac{3}{8}\frac{K+\frac{4}{3}G}{G}=\frac{{J}_{1}\left({x}_{0}\right)}{{x}_{0}{J}_{0}\left({x}_{0}\right)}\:,\:\:\:\:\:\:\:\:\:\:\left(19\right)$$
where \(\:{x}_{0}=\sqrt{\frac{\lambda\:}{{D}_{c}}}{r}_{0}\). This gives the relaxation time \(\:{\tau\:}_{thick}=\frac{1}{\lambda\:}=\frac{{r}_{0}^{2}}{{x}_{0}^{2}\:{D}_{c}}\). Figure 3 shows \(\:{x}_{0}\) as a function of \(\:\frac{K}{G}\) (the solution \(\:{x}_{1}\) for the stress relaxation test is also plotted, see Appendix). We also obtain,
$$\:\alpha\:=-\frac{{F}_{N}}{6\pi\:{r}_{0}^{2}K}\:.\:\:\:\:\:\:\:\:\:\:\left(20\right)$$
Finally, we determine the amplitude \(\:A\) by considering the initial condition where the solvent cannot evacuate from the gel and that the volume is conserved. From Eq. (9), we have:
$$\:\stackrel{-}{{\omega\:}}\left(0\right)=\frac{1}{\pi\:{r}_{0}^{2}}{\int\:}_{0}^{{r}_{0}}dr2\pi\:\:r\:\omega\:(r,0)=2A\:\frac{{J}_{1}\left({x}_{0}\right)}{{r}_{0}}-\frac{{F}_{N}}{3\pi\:{r}_{0}^{2}K}=0\:,\:\:\:\:\:\:\:\:\:\:\left(21\right)$$
and we obtain:
$$\:A=\frac{{F}_{N}}{6\pi\:{r}_{0}K{J}_{1}\left({x}_{0}\right)}\:.\:\:\:\:\:\:\:\:\:\:\left(22\right)$$
With these calculations, we derive the following formulas.
$$\:{\epsilon\:}_{z}\left(t\right)=-\frac{{F}_{N}}{\pi\:{r}_{0}^{2}}\frac{K+\frac{G}{3}}{3G\:K}\left\{1-\frac{1}{3}\frac{G}{K+\frac{G}{3}}\:\text{e}\text{x}\text{p}(-\frac{t}{{\tau\:}_{thick}})\right\}\:,\:\:\:\:\:\:\:\:\:\:\left(23\right)$$
$$\:p\left(r,t\right)=\frac{{F}_{N}}{6\pi\:{r}_{0}}\frac{K+\frac{4}{3}G}{K}\sqrt{\frac{\lambda\:}{{D}_{c}}}\frac{{J}_{0}\left({x}_{0}\frac{r}{{r}_{0}}\right)-{J}_{0}\left({x}_{0}\right)}{{J}_{1}\left({x}_{0}\right)}\:\text{e}\text{x}\text{p}(-\frac{t}{{\tau\:}_{thick}})\:,\:\:\:\:\:\:\:\:\:\:\left(24\right)$$
$$\:{\sigma\:}_{zz}\left(r,t\right)=-\frac{{F}_{N}}{\pi\:{r}_{0}^{2}}\left[1-\left\{\frac{2}{9}\frac{G}{K}+\frac{1}{6}\frac{K-\frac{2}{3}G}{K}\:\frac{{x}_{0}\:{J}_{0}\left({x}_{0}\frac{r}{{r}_{0}}\right)}{{J}_{1}\left({x}_{0}\right)}\right\}\text{e}\text{x}\text{p}(-\frac{t}{{\tau\:}_{thick}})\right]\:\:.\:\:\:\:\:\:\:\:\:\:\left(25\right)$$
3.3 Friction coefficient for thick cylindrical hydrogels
Within the framework of the biphasic lubrication theory, the local frictional stress is given by the following equation [36]:
$$\:{\sigma\:}_{z\theta\:}\left(r,t\right)={\mu\:}_{\infty\:}\left\{\varphi\:p\left(r,t\right)-{\sigma\:}_{zz}\left(t\right)\right\}\:.\:\:\:\:\:\:\:\:\:\left(26\right)$$
where \(\:{\mu\:}_{\infty\:}\) is the friction coefficient at \(\:t\to\:\infty\:\), indicating that the hydrostatic pressure inside the hydrogel is completely relaxed and all the load is sorely supported by the elastic stress of the polymer network. In the rotational shear geometry, the frictional torque is calculated as
$$\:M\left(t\right)={\int\:}_{0}^{{r}_{0}}2\pi\:rdr{\sigma\:}_{z\theta\:}\left(r,t\right)r=2\pi\:{\mu\:}_{\infty\:}{\int\:}_{0}^{{r}_{0}}dr{r}^{2}\left\{\varphi\:p\left(r,t\right)-{\sigma\:}_{zz}\left(t\right)\right\}\:\:\:$$
$$\:=\frac{2}{3}{\mu\:}_{\infty\:}{r}_{0}{F}_{N}\left[1-\left\{\frac{2}{9}\left(\frac{G}{K}\right)+\frac{2}{15}\left(\frac{K-\frac{2}{3}G}{K}\right)\left(\frac{20-3{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)-\frac{4}{15}\varphi\:\left(\frac{K+\frac{4}{3}G}{K}\right)\left(\frac{{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)\right\}\:\text{e}\text{x}\text{p}(-\frac{\:t\:}{\:{\tau\:}_{thick}\:})\right]\:,\:\:\:\:\:\:\:\:\:\:\left(27\right)$$
where we approximate \(\:{J}_{0}\left(x\right)\) and \(\:{J}_{1}\left(x\right)\) as \(\:{J}_{0}\left(x\right)\cong\:1-\frac{{x}^{2}}{4}\) and \(\:{J}_{1}\left(x\right)\cong\:\frac{x}{2}-\frac{{x}^{3}}{16}\). Finally, we obtain the solution for the friction coefficient, by applying Eqs. (1) and (27):
$$\:\mu\:\left(t\right)=\frac{3M\left(t\right)}{2{r}_{0}{F}_{N}}={\mu\:}_{\infty\:}\left[1-\left\{\frac{2}{9}\left(\frac{G}{K}\right)+\frac{2}{15}\left(\frac{K-\frac{2}{3}G}{K}\right)\left(\frac{20-3{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)-\frac{4}{15}\varphi\:\left(\frac{K+\frac{4}{3}G}{K}\right)\left(\frac{{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)\right\}\text{e}\text{x}\text{p}(-\frac{\:t\:}{\:{\tau\:}_{thick}\:})\right]\:.\:\:\:\:\:\:\:\:\left(28\right)$$
Eq. (28) can be simplified to:
$$\:\mu\:\left(t\right)={\mu\:}_{\infty\:}-\left({\mu\:}_{\infty\:}-{\mu\:}_{0}\right)\:\text{e}\text{x}\text{p}\left(-\frac{\:t\:}{\:{\tau\:}_{thick}\:}\right)\:.\:\:\:\:\:\:\:\:\left(29\right)$$
where \(\:{\mu\:}_{0}\) is the friction coefficient at \(\:t=0\), expressed as,
$$\:{\mu\:}_{0}=\:{\mu\:}_{\infty\:}\:\left\{1-\frac{2}{9}\left(\frac{G}{K}\right)-\frac{2}{15}\left(\frac{K-\frac{2}{3}G}{K}\right)\left(\frac{20-3{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)+\frac{4}{15}\varphi\:\left(\frac{K+\frac{4}{3}G}{K}\right)\left(\frac{{x}_{0}^{2}}{8-{x}_{0}^{2}}\right)\right\}.\:\:\:\:\:\:\:\:\:\:\left(30\right)$$
Once the parameters \(\:{r}_{0}\), \(\:G\), \(\:K\), \(\:\kappa\:\), and \(\:{\mu\:}_{\infty\:}\) are given, the time evolution of the friction coefficient can be predicted using Eq. (28). The unconfined compression test can evaluate the two elastic moduli and the permeability. In the Appendix, we present a framework to determine the parameters for thick hydrogels.
3.4 Thin film approximation
Next, we consider the thin film case (see Fig. 2b). In this theoretical analysis, besides the assumptions of rotational symmetry and negligible twisting deformation, we assume that the thickness \(\:{h}_{0}\) is much smaller than the radius \(\:{r}_{0}\) of the hydrogel. Since the displacements \(\:{u}_{r}\) and \(\:{u}_{z}\) are of the same order of the thickness of the hydrogel \(\:{h}_{0}\), the terms \(\:\partial\:{u}_{i}/\partial\:r\) (\(\:i=r,z\)) are much smaller than \(\:\partial\:{u}_{i}/\partial\:z\) [40]. Under the thin film approximation, the analytical solutions can be obtained and thus the thickness dependences can be discussed. First, Eq. (6) can be reduced to the following equations:
$$\:\frac{\partial\:p}{\partial\:r}\cong\:G\frac{{\partial\:}^{2}{u}_{r}}{\partial\:{z}^{2}}\:,\:\:\:\:\:\:\:\:\:\left(31\right)$$
$$\:\frac{\partial\:p}{\partial\:z}\cong\:\left(K+\frac{4}{3}G\right)\frac{{\partial\:}^{2}{u}_{z}}{\partial\:{z}^{2}}=0\:.\:\:\:\:\:\:\:\:\left(32\right)$$
Here we also assume that the pressure variation along \(\:z\) direction is negligibly small, and thus \(\:p=p\left(r,t\right)\). With these approximations, the displacements are described as,
$$\:{u}_{r}\left(r,z,t\right)=\frac{1}{2G}\frac{\partial\:p(r,t)}{\partial\:r}\left({z}^{2}-{h}_{0}^{2}\right)\:,\:\:\:\:\:\:\:\:\:\left(33\right)$$
$$\:{u}_{z}\left(z,t\right)={\epsilon\:}_{z}\left(\text{t}\right)\:\text{z}\:,\:\:\:\:\:\:\:\:\:\left(34\right)$$
The Poisson equation (Eq. (7)) can be also approximated as:
$$\:\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:{u}_{r}}{\partial\:t}\right)+\frac{\partial\:}{\partial\:z}\left(\frac{\partial\:{u}_{z}}{\partial\:t}\right)=\kappa\:\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:p}{\partial\:r}\right)\:.\:\:\:\:\:\:\:\:\:\left(35\right)$$
Substituting Eqs. (33) and (34) into Eq. (35), we obtain the following equation.
$$\:\frac{{z}^{2}-{h}_{0}^{2}}{2G}\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:}{\partial\:t}\left(\frac{\partial\:p}{\partial\:r}\right)\right)+{\dot{\epsilon\:}}_{z}=\kappa\:\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:p}{\partial\:r}\right)\:.\:\:\:\:\:\:\:\:\:\left(36\right)$$
Since both \(\:p(r,t)\) and \(\:{\dot{\epsilon\:}}_{z}\left(t\right)\) are independent of \(\:z\), we need to choose a specific value for \(\:z\) to proceed with our calculations. Here, we set \(\:z=0\) to represent the behavior at the frictional interface. Then we obtain:
$$\:-\frac{{h}_{0}^{2}}{2G}\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:}{\partial\:t}\left(\frac{\partial\:p}{\partial\:r}\right)\right)+{\dot{\epsilon\:}}_{z}=\kappa\:\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:p}{\partial\:r}\right)\:.\:\:\:\:\:\:\:\:\:\left(37\right)$$
Eq. (37) can be solved by applying the boundary condition \(\:p\left({r}_{0},t\right)=0\).
$$\:p\left(r,t\right)=p\left(r,0\right)\text{exp}\left(-\frac{2G\kappa\:}{{h}_{0}^{2}}t\right)+\frac{G}{2}\frac{{r}^{2}-{r}_{0}^{2}}{{h}_{0}^{2}}exp\left(-\frac{2G\kappa\:}{{h}_{0}^{2}}t\right)\:{\int\:}_{0}^{t}ds{\dot{\epsilon\:}}_{z}\left(s\right)\text{e}\text{x}\text{p}\left(\frac{2G\kappa\:}{{h}_{0}^{2}}s\right).\:\:\:\:\:\:\:\:\:\left(38\right)$$
\(\:p\left(r,0\right)\) can determined using the incompressibility condition (\(\:\nabla\:\bullet\:\overrightarrow{u}=0\)) at \(\:t=0\) and \(\:z=0\):
$$\:-\frac{{h}_{0}^{2}}{2G}\frac{1}{r}\frac{\partial\:}{\partial\:r}\left(r\frac{\partial\:p}{\partial\:r}(r,0)\right)+{\epsilon\:}_{z}\left(0\right)=0\:.\:\:\:\:\:\:\:\:\:\left(39\right)$$
With \(\:p\left({r}_{0},0\right)=0\), Eq. (39) becomes:
$$\:p\left(r,0\right)=\frac{G}{2}\frac{{r}^{2}-{r}_{0}^{2}}{{h}_{0}^{2}}{\epsilon\:}_{z}\left(0\right)\:.\:\:\:\:\:\:\:\:\:\left(40\right)$$
Considering the vertical force balance and substituting Eqs. (38), (40), and \(\:{\sigma\:}_{zz}\left(t\right)=\left(K+\frac{4}{3}G\right){\epsilon\:}_{z}\left(t\right)\), we obtain:
$$\:{F}_{N}=-\:{\pi\:}{r}_{0}^{2}\left\{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}\right\}{\epsilon\:}_{z}\left(t\right)+\frac{\pi\:}{2}{G}^{2}\kappa\:{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{4}exp\left(-\frac{2G\kappa\:}{{h}_{0}^{2}}t\right){\int\:}_{0}^{t}ds{\epsilon\:}_{z}\left(s\right)\text{e}\text{x}\text{p}\left(\frac{2G\kappa\:}{{h}_{0}^{2}}s\right)\:.\:\:\:\:\:\:\:\:\:\left(41\right)$$
To solve this integral equation, we set \(\:f\left(t\right)={\epsilon\:}_{z}\left(t\right)exp\left(\frac{2G\kappa\:}{{h}_{0}^{2}}t\right)\) and substitute it into Eq. (41). We obtain:
$$\:{\epsilon\:}_{z}\left(t\right)=-\frac{{F}_{N}}{\pi\:{r}_{0}^{2}\left(K+\frac{4}{3}G\right)}\:\left\{1-\frac{\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}exp\left(-\frac{t}{{\tau\:}_{thin}}\:\right)\right\},\:\:\:\:\:\:\:\:\:\left(42\right)$$
where \(\:{\tau\:}_{thin}={h}_{0}^{2}\:\left\{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}\right\}/\left\{2G\kappa\:(K+\frac{4}{3}G)\right\}\) is the relaxation time for thin samples. Substituting Eqs. (40) and (42) into Eq. (38), the pressure and the vertical stress can also be obtained.
$$\:p\left(r,t\right)=\frac{{F}_{N}}{2\pi\:{r}_{0}^{2}}\frac{{{r}_{0}^{2}-r}^{2}}{{h}_{0}^{2}}\frac{G}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}exp\left(-\frac{t}{{\tau\:}_{thin}}\right),\:\:\:\:\:\:\:\:\:\left(43\right)$$
$$\:{\sigma\:}_{zz}\left(t\right)=-\frac{{F}_{N}}{\pi\:{r}_{0}^{2}}\:\left\{1-\frac{\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}exp\left(-\frac{t}{{\tau\:}_{thin}}\:\right)\right\}.\:\:\:\:\:\:\:\:\:\left(44\right)$$
3.5 Calculation of friction coefficient for thin hydrogels
Similarly to the thick film case, the frictional torque is calculated as:
$$\:M\left(t\right)={\int\:}_{0}^{{r}_{0}}2\pi\:rdr{\sigma\:}_{z\theta\:}\left(r,t\right)r=2\pi\:{\mu\:}_{\infty\:}{\int\:}_{0}^{{r}_{0}}dr{r}^{2}\left\{\varphi\:p\left(r,t\right)-{\sigma\:}_{zz}\left(t\right)\right\}=\frac{2}{3}{\mu\:}_{\infty\:}{r}_{0}{F}_{N}\left\{1-\frac{5-4\varphi\:}{20}\frac{\:G{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}exp\left(-\frac{t}{{\tau\:}_{thin}}\:\right)\right\}.\:\:\:\:\:\:\:\:\:\left(45\right)$$
Finally, we obtain the solution for the friction coefficient by applying Eq. (1):
$$\:\mu\:\left(t\right)=\frac{3M\left(t\right)}{2{r}_{0}{F}_{N}}={\mu\:}_{\infty\:}\left\{1-\frac{5-4\varphi\:}{20}\frac{\:G{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}exp\left(-\frac{t}{{\tau\:}_{thin}}\:\right)\right\}\:.\:\:\:\:\:\:\:\:\left(46\right)$$
Eq. (46) can also be expressed in a simple form (Eq. (29)), with the initial friction coefficient:
$$\:{\mu\:}_{0}=\:{\mu\:}_{\infty\:}\frac{K+\frac{4}{3}G+\frac{G\varphi\:}{5}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}{K+\frac{4}{3}G+\frac{G}{4}{\left(\frac{{r}_{0}}{{h}_{0}}\right)}^{2}}.\:\:\:\:\:\:\:\:\left(47\right)$$
Eq. (47) can be approximated up to the second order in \(\:{h}_{0}/{r}_{0}\:(\ll\:1)\):
$$\:{\mu\:}_{0}\cong\:\:\frac{4}{5}{\mu\:}_{\infty\:}\left\{\varphi\:+\left(5-4\varphi\:\right)\frac{K+\frac{4}{3}G}{G}{\left(\frac{{h}_{0}}{{r}_{0}}\right)}^{2}\right\}.\:\:\:\:\:\:\:\:\left(48\right)$$
This result indicates that the initial friction coefficient is determined by the dry friction of the polymer network, its volume fraction, and the thickness of the gel. Particularly, in the thin film limit, the initial friction is given by \(\:{\mu\:}_{0}=\:\frac{4}{5}{\mu\:}_{\infty\:}\varphi\:\).
{kind=link}