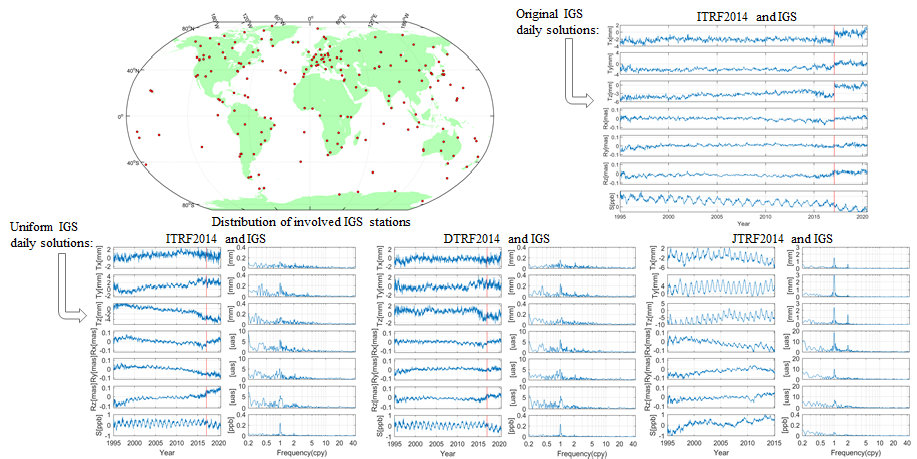
As an indispensable component of TRS realizations, IG2 reveals its predominant status in time series combination of global frame especially due to the extensive distribution of ground stations and the accurate determination of station positions. The stations contributing to the IG2 and the ITRF2014 are displayed in Fig. 1. As seen in Fig. 1, the distribution of the involved stations is globally but relative sparse in southern hemisphere and ocean areas (Wu et al. 2017), which brings obstacle in precise assessment of geo-center motions (Rebischung et al. 2014, 2016; Rietbroek et al. 2012, 2014; Wu et al. 2015, 2017). Station number evolution of individual ACs illustrated in Fig. 2 demonstrates that most ACs’ station number, except GTZ and ULR, tend to become stable after 2004, which indicate the maturity of the GNSS network. In addition, each daily AC solution consists of unique network geometry and uses inconsistent processing strategies, so unequal amplitude and phase of seasonal signals, even spurious signals, may be contained in position time series of the ACs. All the available signals are combined and spurious signal are mitigated in the IG2 time series through the advantageous combination strategies used by IGS.
Helmert transformation is a typical method for reference frame analysis and its parameter estimates may be affected by the network distribution. A stable and well distributed network is selected with 165 ground stations, which is displayed in Fig. 3, and its number evolution is displayed in Fig. 4. The selection criteria contain two points: continuity and stability of the stations participating in the daily solutions. All the stations with data length longer than 2 years over a consecutive periodic of time, among them 12 suffer from the effect of major earthquakes. We believed that the selected station network is credible when acquiring Helmert transformation results.
Comparison between ITRF2014 and IGS
The ITRF2014 is a superior release compared to past ITRS realizations with two innovations implemented in construction of the ITRF2014: First, the PSD models along with linear station motions are provided for the stations affected by major earthquakes; Second, seasonal signals (annual and semi-annual) are estimated at stacking step for the purpose of acquiring more precise velocities of ground stations. As it precisely modeling the actual trajectories of station position time series, ITRF2014 is demonstrated to be a more robust secular frame.
In this section, IG2 daily solutions from Jan. 1995 to Jan. 2015 and IGS solutions from Feb. 2015 to Jul. 2020 are selected to compare with the ITRF2014 positions of selected stations, where the station coordinates of the ITRF2014 after Jan. 2015 are from the prediction based on ITRF models.
In the following of this paper, both the IG2 and IGS are uniformly called IGS. The IGS and ITRF2014 station coordinate time series for ALBH and MIZU were plotted in Fig. 5. In Fig. 5, one can clearly see constant offsets between ITRF2014 and IGS of the two sites. Such a non-negligible offset may reflect the inconsistent reference origin of the two frames. In addition, the site ALBH suffer from an abrupt break because of antenna change in Sep.15 2015, while ITRF2014 model miss the corresponding corrections. The site MIZU suffers from an increasing position errors in the ITRF2014 models due to inaccurate position prediction after Jan. 2015. Such phenomena indicate that using ITRF2014 coordinates at a reference epoch and velocities to extrapolate positions of ground sites are inappropriate to a certain extent. In addition, although non-linear signals are contained in the IGS time series, IGS is actually a linear frame whose origin and orientation are aligned to the IGb08/IGS14.
In order to further access the discrepancies between the two linear frame, Helmert transformation is performed between them. In the Helmert transformation processing, the outlier rejection thresholds are 10, 10, 30 mm in N, E, U components, respectively (Fritsche et al. 2014). Figure 6 displays translation, rotation, and scale time series estimated between the ITRF2014 and IGS solutions. The discontinuity occurs in Feb. 2017 attribute to the fact that IGS daily solutions are based on IGS realizations of ITRF2014 (i.e. IGS14) after Feb. 28, 2017. The averages of translation time series are statistically approach to zero after that time, while greater offsets are present in scale offsets, which is related to the differential scale rate between the ITRF2014 and IGS solutions (Rebischung et al. 2016b). Rotation parameters in all components with negligible offsets and temporal variations along the full time-span demonstrates excellent agreement of orientation between IGS and ITRF2014 attributing to NNR constraint applied to continuous ITRFs.
Non-zero constant offsets of X, Y components and an apparent drift from Z component translation time series before Feb. 28, 2017 represent the discrepancy between the secular ITRF2014 origin and the long-term mean origin of IG2. The slope 0.12 mm/yr and − 0.03 ppb/yr are found in Z component of translation and scale time series, which is coincident to transformation parameters from ITRF2014 to ITRF2008. Actually, the origin and orientation of IGS are aligned to the IGb08 before Feb. 28, 2017, and the scale of IGS is determined by using the igs08.atx (Rebischung et al. 2016). Both the drift of Z component translation time series and scale offsets suggest precision improvements coming from contributing reprocessed data because of corresponding improved technique-specific analysis strategies in ITRF2014. Greater biases in the period from 1995 to 1998 are caused by a poor geometry distribution of usable GNSS stations selected for the minimum condition in IGS daily solutions.
In order to obtain homogeneous result of Helmert transformation comparison, the IGS solutions before Feb. 29, 2017 are corrected to be of uniform datum with the IGS14 using the transformation parameters estimated between IGS14 and IGb08. After the frame transformation, the transformation parameters and their amplitude spectrum are displayed in Fig. 7. The time series of seven transformation parameters become more consistent after the correction especially for translation parameters. However, an offset of less than 1 mm before 2015, although less than its magnitude in Fig. 6, can be observed in Z component of the translation time series, which could be interpreted by the antenna calibration updates differences of the specific stations between igs08.atx and igs14.atx (Rebischung et al. 2012) and misalignment to the secular frame (i.e. IGb08) when generating the IGS solutions. The remaining discrepancies appear in the translation time series from Oct. 2012 to Jan. 2017 may be caused by the geometry degradation of IGb08, and prediction mis-modeling of ITRF2014 after Jan. 2017. Scale offsets after Jan. 2017 with an offset about − 0.25 ppb is coincident with the long-term scale rate difference of 0.026 ppb/yr and zero-offset at epoch 2010.0 between ITRF2014 and IGS14-based IGS solutions (Rebischung et al. 2016b). Thus, scale of IGS14-based solutions defined by igs14.atx is not exactly equal to scale of ITRF2014 over time.
The non-linear signals result from IGS time series related to real geophysical signals and spurious signals induced by orbit modeling deficiencies et al. Among all seasonal and dracontic signals, the biggest amplitudes at annual signals are less than 0.25 mm for translation offsets and less than 7 uas for rotation offsets, which could benefit from the advantageous combination strategies used by IGS. While non-linear scale offsets with annual amplitude about 0.25 ppb in last panel of Fig. 7 are mostly expected from the non-linear vertical deformations of the selected station network (Altamimi et al. 2011, Collilieux et al. 2010) and just a fraction from imperfection in the adopted satellite antenna z-PCO values (Ge et al. 2005).
Comparison between DTRF2014 and IGS
The DTRF2014 is another secular reference frame with normal equations of the contributing space techniques are combined rather than solutions are combined in the ITRF2014 construction (Seitz et al. 2016; Angermann et al. 2020). What’s more, piece-wise linear models and atmospheric and hydrological NTL was applied for DTRF2014 to describe station non-linear motions (Seitz et al. 2016). Correspondingly, piece-wise linear models used for stations affected by major earthquakes may cause a certain departure from the real trajectory after major earthquakes. As an instance, the coordinates time series of station ASPA are displayed in Fig. 8. In Fig. 8, we find that using the ITRF2014 models to fit IGS time series perform better than the DTRF2014 especially after 2015.0. As post-seismic response may last several years, the affected stations will contain irregular error signals which is different from systematic errors. And applying NTL models to correct individual daily or weekly solutions motions will generate position and velocity differences. Again, there are constant offsets existing in most station position time series between DTRF2014 and IGS, but the magnitude may differ from the previous section in the comparison between ITRF2014 and IGS, which indicate inconsistent reference origin and velocities of ground sites between ITRF2014 and DTRF2014.
We perform Helmert transformation between the DTRF2014 and the corrected IGS time series, and employ identical outlier rejection condition as utilized between ITRF2014 and IGS. The corrected transformation parameter time series and their amplitude spectrums are displayed in Fig. 9. The offset and drift results from linear regressions to the transformation parameter time series are provided in Table 1 at epoch 2010.0.
Table 1
Offsets at epoch 2010.0 and drifts of the transformation parameter time series estimated between DTRF2014 and IGS
| |
T_X
|
T_Y
|
T_Z
|
R_X
|
R_Y
|
R_Z
|
Scale
|
|
offset
|
0.8
|
1.3
|
-1.9
|
-2.0
|
-12.7
|
-2.5
|
0.16
|
|
drift
|
0.03
|
0.12
|
-0.19
|
-2.3
|
-4.0
|
4.5
|
-0.001
|
| Note: Unit for translation parameters are mm, for rotation parameters are uas, for scale parameter is ppb; Unit for translation parameters are mm/yr, for rotation parameters are uas/yr, for scale parameter is ppb/yr. |
The translation offsets are at mm level. And their drifts are statistically not equal to zero, which indicates non-negligible linear discrepancies between IGS and DTRF2014. The RMS in the fitting of translation time series suggest that the origin agreement between the two frames is at the level better than 5.5 mm. As reveled in the previous section, the IGS frame is basically the same as ITRF2014, and both ITRF and DTRF defines their origin using identical data observed by SLR. we conclude that inconsistent analysis strategies, especially non-linear signals assessment methods at stacking step, used by the ITRF and DTRF contributed to linear discrepancies of origins in all components.
Time series of rotations between DTRF2014 and IGS exhibit evident linear signals in all three components. Maintenance of orientation relies on NNR constraint applied to a well distributed GNSS network and a set of well-behaved stations. Unlike the ITRF2014, whose orientations are aligned to ITRF2008, the orientation of DTRF2014 is aligned to DTRF2008 (Seitz 2020). The linear inconsistence between DTRF2014 and ITRF2014 may result from the biased NNR condition applied on two distinct GNSS station networks at different reference epoch by the two frames (Bloßfeld et al. 2014). In addition, partly because of correlation between translation and rotation parameters, the linear discrepancies of translation were observed in rotation offsets between the two frames. The agreement between the two frames become worse after 2014, which may be related to faster decay of DTRF2014 linear modeling.
An offset 0.16 ppb and statistically zero drift is found in scale offsets before Feb. 2017, which indicates scale differences determined by ITRF2014 and DTRF2014. Linear behaviors of scale differences are the consequence of scale processing strategies adopted in averaging the VLBI/SLR information and local ties (Moreaux et al. 2020). Scale offsets after Feb. 2017 are close to zero, so the scale define by igs14.atx of IGS solutions seems closer to scale of DTRF2014 during this period. However, both annual and semiannual amplitude of 0.25 ppb and 0.05 ppb, respectively, are quite equivalent with scale offsets estimated between ITRF2014 and IGS time series. Therefore, non-linear variations of the selected station network presented in scale offsets are much similar, which is not influenced by scale processing strategies of discrepancies between ITRF2014 and DTRF2014.
Except the non-linear signals in scale offsets, the biggest spectral peak less than 0.3 mm is visible in Y component of translation time series, and distinct peaks can also be observed at several harmonics of the GPS draconitic year. All the amplitudes of spectral peaks are slightly unequal to amplitude spectra estimated between ITRF2014 and IGS, which indicate coordinate differences induced by different combination strategy, non-linear signals and PSD models.
Comparison between JTRF2014 and IGS
Unlike the secular frames ITRF2014 and DTRF2014, the JTRF2014 is a time series-based reference frame realized by combining space geodetic inputs including VLBI, SLR, GNSS, and DORIS at a weekly resolution, whose origin is at the quasi-instantaneous CM as measured by SLR. The scale is the weighted average of the quasi-instantaneous scales determined by SLR and VLBI observations. The frame orientation is conventionally aligned to ITRF2008 through the NNR constraint applied to each weekly solution. As a quasi-instantaneous frame, the JTRF2014 attempt to provide stations positions refer to quasi-instantaneous geocenter position. However, the quasi-instantaneous frame was affected by suboptimal network geometry and technique-specific errors along time inevitably. Thus, subsecular variations of geophysical processes and technique-specific errors will represent in the time series of realized quasi-instantaneous frame. Without exception, station position time series indicate inconsistent trajectory with IGS, such as ALGO with not only a constant offset but also unequal amplitude of periodic signals between the two position time series. Stable offsets between the two frame transformation parameters time series indicate long-term mean bias of origin between them. Periodic signals determined by quasi-instantaneous reference frames are unequal to IGS time series because part of them are absorbed into geocenter non-linear motion.
Likewise, Helmert transformation is performed between JTRF2014 and the corrected IG2 solutions. JTRF2014 is a quasi-instantaneous frame and unable to access to the period after Feb. 2015, so only IGS solutions from 1995 to 2014 are compared in this section. The corrected transformation parameter time series and their amplitude spectrums are displayed in Fig. 11. The offset and drift results from linear regressions to the transformation parameter time series are provided in Table 2.
Table 2
Offsets at epoch 2010.0 and drifts of the transformation parameter time series estimated between JTRF2014 and IGS
| |
T_X
|
T_Y
|
T_Z
|
R_X
|
R_Y
|
R_Z
|
Scale
|
|
offset
|
-2.1
|
-0.6
|
-1.2
|
-49.3
|
-5.2
|
2.4
|
0.4
|
|
drift
|
-0.10
|
0.03
|
0.21
|
-5.72
|
4.25
|
2.87
|
0.05
|
| Note: Unit for transformation parameters are the same as Table 1. |
Translation time series with greater mean biases shown in Fig. 11 indicate the deviation degree between the instantaneous origin of JTRF2014 and long term mean origin of IGS14. Linear fits of the translation drifts are statistically zero for Y components. Drifts of -0.10 and 0.33 mm/yr are found for X and Z component in the long-term fitting, respectively. The amplitude spectra are represented in the corresponding right panels of Fig. 11. Unlike former analysis, significant spectrum peaks at the annual, to a less degree, semi-annual frequency, are visible in translation time series, whose nature is geophysical and mostly related to mass transformation of the earth surface, and to a large extent, eventually reflect real seasonal geocentric motion and just a fraction of spurious signals due to technique-dependent errors (Blewitt et al. 2002). In addition, the time-variable trend is in poor agreement with the long-term averages, which imply that the SLR-determined origin is not only nonlinear but also with short-term variation trend. Therefore, using a long-term averaged origin of SLR observations to describe geocenter motions of the solid earth like ITRF2014 and DTRF2014 seems not rigorous.
The rotation offsets between JTRF2014 and the corrected IG2 solutions, together with corresponding amplitude spectra are reported in the 4th to 6th rows of Fig. 11. Although both JTRF2014 and IG2 are uniformly aligned to ITRF2008, time series of rotation parameters reveals linear inconsistency over time. The trends of each component are 5.7, 4.2, 2.8 uas/yr respectively, which imply that the rotational alignment of JTRF2014 and IG2 is consistent at the level of 5.7 uas/yr (about 0.2 mm/yr). Except obvious trends, inter-annual variations are contained in time series of rotations too. Particularly, annual amplitudes estimated for X and Y component are 18.46 and 10.04 uas (0.55 and 0.30 mm), respectively. In addition, an abnormal fluctuation is visible in 2010. Largely part of rotation temporal variations come from the biased NNR condition applied at every weekly solution of JTRF2014 due to CN variations (Dong et al. 2003; Bloßfeld et al. 2014). The worse agreement between JTRF2014 and IG2 may cause significant pole coordinate differences because of the high correlation between pole motion observations and rotations about the X and Y axis (Abbondanza et al. 2020).
It’s hard to find out evident seasonal signals and draconitic frequencies of scale offset time series estimated between JTRF2014 and IGS from last row of Fig. 11. Here, non-linear variation of the selected GNSS network vertical component disappears due to the fact that periodic signals are also characterized in the IGS frame. The scale discrepancy between JTRF2014 and the corrected IG2 is up to 1 ppb (about 7 mm in equator). Temporal instability shown in time series of scale offsets are related to SLR-derived scale, which is affected by the degradation of the SLR ground network over time (Altamimi et al. 2007). Besides, a positive long-term linear varying trend (about 0.05 ppb/yr) can be noticed in scale offset time series. The significant variation trend result from the different scale processing strategies adopted by IGN and JPL in averaging the VLBI/SLR information, which indicates JTRF2014 scale averaged by VLBI/SLR observations is significantly disturbed by poor network geometry of the two systems, range biases of SLR (Appleby et al. 2016) and possible VLBI antenna gravity deformation (Sarti et al. 2009, 2010; Gipson 2018). Therefore, the credibility of scale averaged by both SLR and VLBI is still a challenging task when establishing quasi-instantaneous frames. And the urgent requirement for a precise TRF is maintaining and improving the geodetic infrastructure and investigating the causes of technique-specific questions.
{kind=link}